
 отправка...
отправка...Проблема резонанса крепежной конструкции вибростенда
Крепежные приспособления вибростенда нередко имеют резонансные частоты внутри диапазона испытаний, что может вызвать серьезные проблемы. Как правило, в этом случае испытатель пытается управлять шейкером с помощью акселерометра обратной связи, закрепленным на образце. Однако это позволяет лишь контролировать уровень вибрации в точке, где установлен акселерометр, и только. Повлиять на резонансы приспособления таким способом не удастся. Анализ такой ситуации и рекомендации по выходу из нее описаны в данной статье.
Вибрационные испытания изделий проводятся с целью проверки их пригодности для работы в условиях воздействия механических факторов окружающей среды. Для этого используются вибростенды, создающие воздействия, имитирующие такие факторы. Обычно воздействия задаются в виде технических требований к испытаниям.
Для передачи воздействия от шейкера к испытываемому изделию (далее — изделию) в вибростенде предусмотрена крепежная конструкция, включающая арматуру шейкера (цилиндр, где закреплена сигнальная катушка), расширительную головку (или плиту стола скольжения), а также крепежное приспособление, непосредственно к которому прикрепляется изделие. Таким образом, когда мы говорим о крепежной конструкции, то имеем в виду все узлы между подвижной катушкой шейкера и изделием (арматура нам не видна, но это не значит, что она не является частью крепежной конструкции). На рис. 1 показаны типичные элементы крепежной конструкции.

Рис. 1. Крепежная конструкция:
а) типичные элементы;
б) реальный пример
Испытатель стремится создать крепежную конструкцию предельно жесткой и легкой. Это обусловило бы отсутствие у нее резонансов в тестируемом диапазоне частот, а также гарантировало бы одинаковое перемещение образца и крепежного приспособления. Достигнуть этого чрезвычайно сложно, если не невозможно, особенно для больших вибростендов (примеры на рис. 2).

Рис. 2. Большие вибростенды
Такие вибросистемы обычно имеют низкие резонансные частоты из-за большой массы и недостаточной жесткости всех элементов крепежной конструкции: арматуры, расширительной головки (или плиты стола скольжения) и крепежного приспособления. Испытатель часто вынужденно игнорирует эти недостатки и предполагает, что контроллер системы управления шейкера сможет компенсировать их.
К сожалению, вопреки распространенному мнению контроллер не может полностью подавить резонансы крепежной конструкции. Он способен поддерживать только уровень виброускорения в месте установки контрольного акселерометра. На все резонансы конструкции он повлиять не в состоянии. Система обратной связи, состоящая из акселерометра и контроллера, служит для отслеживания перемещения подвижной катушки шейкера, чтобы обеспечить требуемый уровень ускорения в точке установки акселерометра. Нередко устанавливается несколько акселерометров в разных точках крепежной конструкции, а их сигналы усредняются для выработки управляющего сигнала. Но этот прием позволяет лишь поддерживать усредненное значение виброускорения в качестве параметра управления. Резонансные частоты и динамические характеристики крепежной конструкции остаются неизменными. Описанное усреднение — хороший способ достижения «лучшего вида» спектра управления, но оно не устраняет резонансных проблем, связанных с крепежной конструкцией. Единственный способ, при котором несколько акселерометров могут быть правильно использованы на нежесткой конструкции, — когда каждый из них имеет независимую обратную связь с отдельным управляемым шейкером. Это может быть чрезвычайно сложно, поскольку понадобится несколько шейкеров и контроллер с несколькими выходами (MIMO).
В некоторых случаях просто невозможно иметь свободные от резонансов крепежные конструкции (пример показан на рис. 3).

Рис. 3. Свободные от резонансов крепежные конструкции
Для инженера-испытателя очень важно полностью понять и задокументировать динамику всей установки для проведения достоверных испытаний на вибрацию. Если имеются резонансы крепежной конструкции, то хорошее понимание того, какие элементы несут за них ответственность, поможет либо изменить крепежную конструкцию, подняв резонансы выше интересующего частотного диапазона, либо монтировать изделия так, чтобы минимизировать эффекты этих резонансов. Чтобы понять важность этих проблем, рассмотрим теорию вопроса, а затем сделаем выводы, как лучше всего справляться с ситуацией.

Рис. 4. Схема объекта с одной степенью свободы (SDoF)
Основные теоретические аспекты
Схема объекта с одной степенью свободы (SDoF), совершающего движение под воздействием внешней силы, показана на рис. 4. Уравнение его движения:
![]()
где m — масса объекта; ẍ — ускорение; c — коэффициент демпфирования; ẋ — скорость; k — коэффициент упругости; x — перемещение; f(t) — воздействующая сила.
Опустив преобразования, перейдем к решению уравнения для объекта SDoF в случае синусоидального возбуждения:

Решение дается для отношения динамического смещения x к статическому смещению δst, где ω — частота возбуждения; ωn — частота собственная; ζ — коэффициент критического затухания.
Возникновение резонанса на частоте ωn показано на рис. 5.
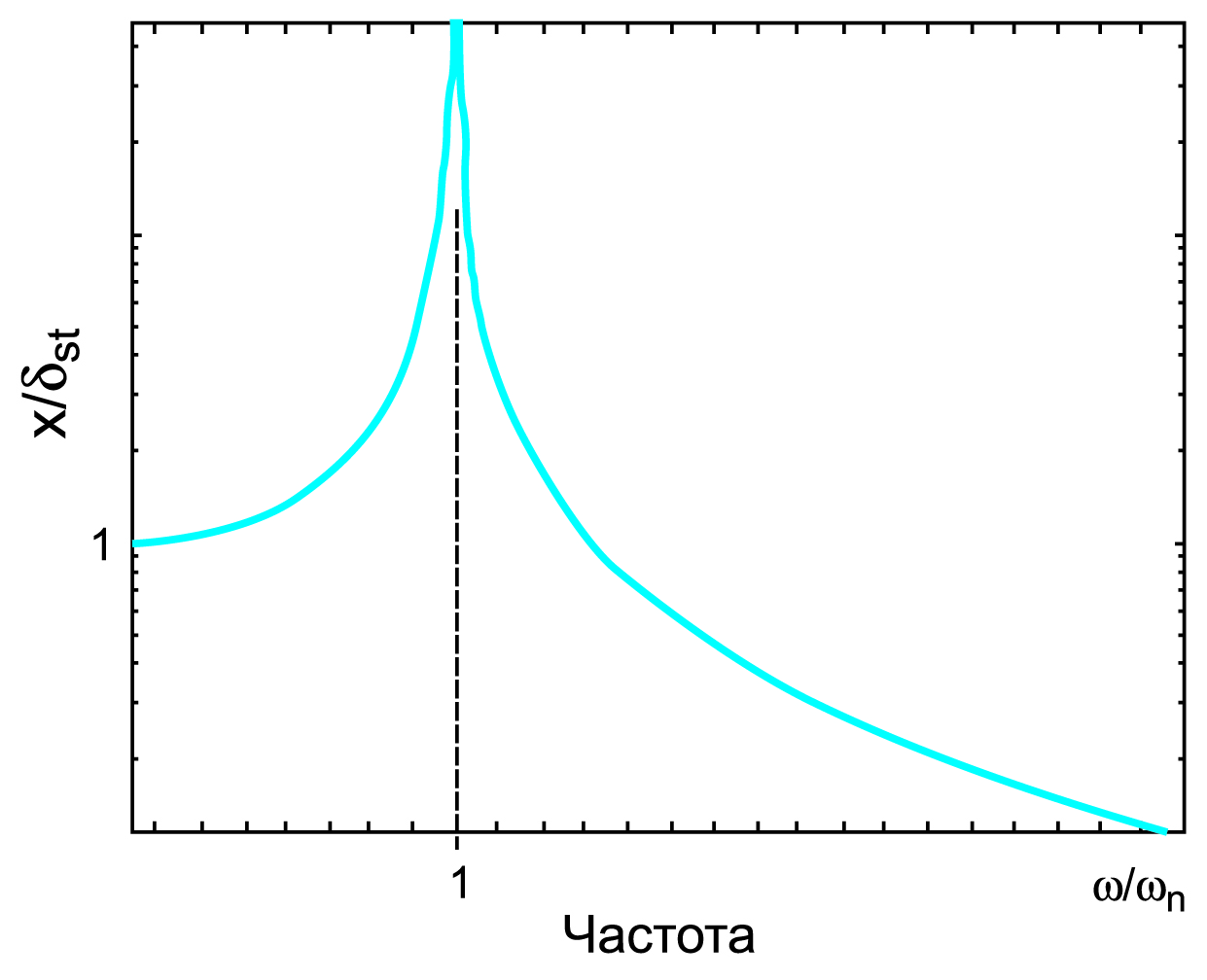
Рис. 5. График резонанса объекта SDoF при синусоидальном возбуждении
Для перехода к анализу системы с несколькими степенями свободы (MDoF) рассмотрим систему из двух объектов SDoF, а затем обобщим на систему из большего количества таких объектов (рис. 6).

Рис. 6. Схема системы с двумя степенями свободы
Уравнение движения такой системы имеет вид:
![]()
В матричном виде:

Или кратко:
![]()
В такой форме легко представлять любое количество уравнений или масс. В ней уравнения демонстрируют связь между различными объектами SDoF. Далее используется математический процесс, называемый собственным решением, чтобы разбить эти сложные связанные уравнения на набор простых SDoF. В результате уравнения будут иметь вид:

Каждое уравнение изолируется от любого другого и описывает объект SDoF, соответствующий каждой из собственных частот системы. Таким образом, мы взяли сложную систему уравнений и разбили ее на ряд гораздо более простых уравнений. Это схематично демонстрируется на рис. 7.

Рис. 7. Схема перехода от сложной системы к набору простых
Это означает, что теория SDoF применяется к системе MDoF для каждой собственной частоты вибрации системы MDoF. На рис. 8 проиллюстрировано представление частотного отклика для сложной системы как суммы откликов набора SDoF-объектов.

Рис. 8. Суперпозиция откликов объектов SDoF
Если мы рассмотрим взаимовлияние конструкции крепежа и изделия как динамическое отношение между их собственными частотами, то для понимания такой динамической связи между указанными элементами можно использовать некоторые простые уравнения. Для иллюстрации возьмем уравнение для двух объектов SDoF, характеризующих такое устройство как регулируемый амортизатор. Оно приводится во многих учебниках по вибрации (рис. 9).

Рис. 9. Иллюстрация уравнения, схемы и частотной характеристики амортизатора
Это уравнение показывает, что существует связь между собственной частотой и коэффициентом жесткости каждого отдельного элемента системы. Величина динамического взаимодействия в большой степени зависит от соотношения между этими параметрами. Для заданного соотношения масс двух одиночных объектов, имеющих одну и ту же собственную частоту, типичный график результирующих динамических характеристик показан на рис. 9. Расстояние между двумя пиками связанной системы зависит от соотношений масс отдельных объектов SDoF. Таким образом, мы можем использовать это уравнение для проектирования амортизаторов, для проектирования сейсмических масс и т. п. Но оно также помогает описать динамическое взаимодействие между любыми двумя системами, если охарактеризовать их как объекты SDoF. (Напомним, что любая сложная система MDoF всегда может быть представлена как набор простых объектов SDoF.)
Простые крепежные конструкции
Для того чтобы продемонстрировать некоторые обсуждаемые динамические эффекты взаимосвязи, рассмотрим представление крепежного приспособления и изделия с помощью простой модели для иллюстрации некоторых важных моментов. Проанализируем два различных по конструкции приспособления, которые будут использоваться для крепежа образца. Для представления изделия используется схема в виде двух объектов SDoF, а для приспособления — схема в виде одного объекта SDoF-модели, описывающей первую резонансную частоту данного приспособления. Это схематически показано на рис. 10.

Рис. 10. Раздельное представление схем изделия и приспособлений для его крепежа
В нашем примере изделие должно испытываться на частотах, не превышающих максимальную (Maximum test frequency). Оба приспособления имеют резонансные частоты за пределами диапазона частот испытаний, но приспособление 1 имеет первую резонансную частоту, очень близкую к максимальной частоте тестового диапазона. Теперь объединяем системы. Результирующий частотный отклик показан на рис. 11 для обоих приспособлений.

Рис. 11. Отклики:
а) каждой из схем отдельно;
б) после объединения схем приспособления и изделия
Прежде всего следует отметить, что резонансные частоты изделия, установленного с помощью приспособления, незначительно различаются для разных приспособлений. А вот амплитуда пиков отклика отличаются существенно. Это означает, что ответные реакции рассматриваемых конструкций различны. (Не вдаваясь подробно в теорию, укажем, что эти амплитуды непосредственно связаны с собственными частотами системы на каждой конкретной частоте.) Таким образом, изделие будет подвергаться более высоким уровням ускорения, чем необходимо, из-за использования нежесткого крепежного приспособления. Данный пример наглядно показывает, что приспособление должно быть настолько жестким, насколько это возможно, и его первый резонанс должен максимально выходить за пределы диапазона испытательных частот, в противном случае может возникнуть неблагоприятная динамическая взаимосвязь между изделием и приспособлением.
Пример расширительной головки (столика)
Последний пример показал, что даже при резонансной частоте приспособления, находящейся за пределами диапазона испытаний, может появляться «вредное» динамическое взаимодействие между изделием и приспособлением. Но что будет, если приспособление имеет резонансную частоту внутри диапазона испытаний?
Для иллюстрации такой ситуации была изучена модель ребристой расширительной головки с установленным на ней изделием в форме рамы. Головка смоделирована так, чтобы у нее были резонансные частоты внутри частотного диапазона испытаний (если бы головка была «бесконечно» жесткой и свободной от резонансов, то не имело бы значения, ни где изделие установлено на головке, ни где установлен акселерометр управления — акселерометр обратной связи системы управления). Были изучены две модели: одна с изделием, симметрично установленным на головке, другая — с асимметричной установкой изделия.

Рис. 12. Собственные частоты незагруженной головки
Для наглядности первые девять собственных частот головки показаны на рис. 12. Обратите внимание, что ни на одной из частот качание в осях координат не инициируется воздействием только по одной оси. Все эти собственные частоты показаны здесь лишь для полноты картины.
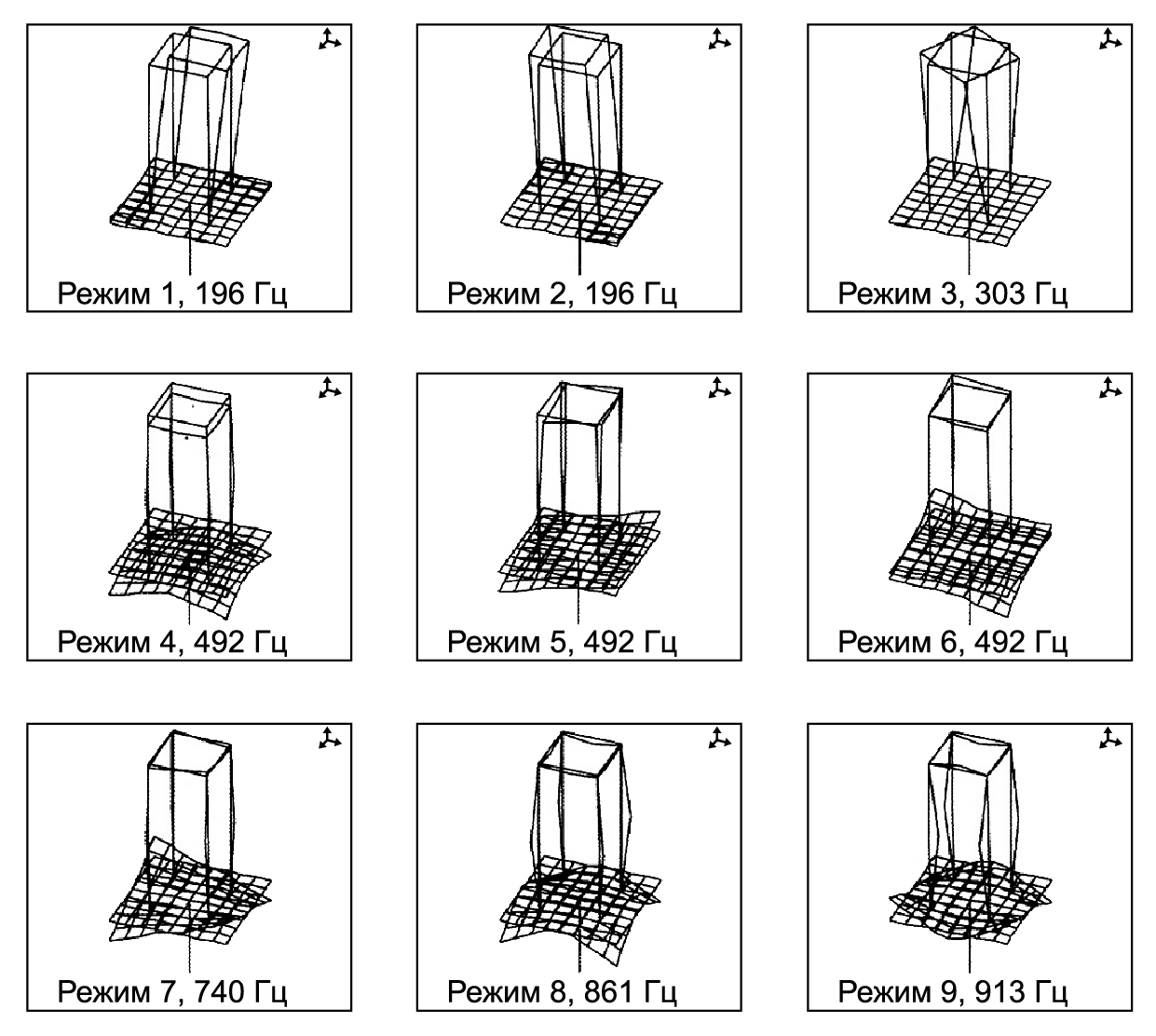
Рис. 13. Собственные частоты образца симметрично установленного на головке
Первые девять резонансных частот головки с симметрично установленным на ней изделием, показаны на рис. 13. Опять же, ни одна из частот качания в осях координат не будет возбуждаться только по одной оси. Для данного случая, когда рамка установлена симметрично на головке, все колебания также симметричны.

Рис. 14. Собственные частоты образца несимметрично установленного на головке
Первые девять резонансных частот головки с несимметрично установленным на ней изделием, изображены на рис. 14. Здесь все собственные колебания несимметричны. Очень важно отметить, что колебания изделия значительно отличаются при симметричном и асимметричном его креплении на головку (рис. 13, 14).

Рис. 15. Симметричное и несимметричное крепление изделия на головку
Если бы мы выполнили развертку по частоте и сравнили реакцию изделия на одной из частот при его симметричном и несимметричном креплении на головку, были бы видны существенные различия (рис. 15). Они заметны особенно в верхней части изделия (оно имеет конструкцию в виде рамы параллелепипеда). График для симметричного размещенного изделия показывает, что все точки его верхней части движутся с одинаковой амплитудой. График для несимметричного размещения демонстрирует, что задний угол верхней части изделия колеблется со значительно большей амплитудой, чем остальные части рамы. Все это говорит о важности места крепления изделия на головке.
Теперь подумаем о том, где должен находиться акселерометр управления. В какой точке он должен быть установлен для теста, когда головка нежесткая (рис. 13)? Выбор этой точки связан с риском перегрузки или недогрузки изделия при его испытании.
Если акселерометр установить в верхней части рамы? Но ведь при ассиметричном размещении изделия на головке возникнут значительные различия в колебаниях верхней части рамы. Именно поэтому, как правило, акселерометр не монтируется в этом месте.
Но что произойдет, если рассмотренная выше рама является крепежным приспособлением, установленным на головке, для монтажа изделий? Будет ли ее динамика влиять на тест, который должен быть выполнен? Ответ: несомненно.
Мы увидели, что динамика приспособления может повлиять на результаты теста. Акселерометр позволяет регулировать входной сигнал для формирования сигнала возбуждения колебаний арматуры, чтобы поддерживать их желаемый уровень. Но он не может изменить динамику, существующую из-за взаимосвязи между головкой и изделием.
Важно понять, что крепежная конструкция — это не только устройство, которое мы проектируем для крепежа изделия. В ее состав входит головка расширителя (или плита стола скольжения), арматура и промежуточные крепежные приспособления для размещения испытываемых изделий. При проведении теста вибрации учитываются динамические характеристики всех этих элементов. Если какой-либо из данных компонентов имеет резонансы в интересующем частотном диапазоне, обязательно возникнут проблемы. Весьма вероятно возникновение резонансов. Для идентификации потенциально резонансных частот полезно выполнить анализ модели крепежной конструкции методом конечных элементов или модальное экспериментальное исследование реальной конструкции.
Арматура в качестве приспособления
Выше обсуждались только доступные пользователю части вибрационной системы. Однако даже незагруженная арматура шейкера может иметь резонансы ниже 2000 Гц. Это особенно актуально для мощных вибрационных систем с арматурами диаметром более 500 мм. Иногда такая арматура имеет более одного резонанса ниже 2000 Гц.
Такие резонансы могут вызвать проблемы при испытаниях и часто поначалу проявляются как затруднения в управлении шейкером. Инженер-испытатель сразу же обвиняет в этих проблемах систему управления, утверждая, что «система управления функционирует неправильно». Если же в вибрационной системе присутствует расширительная головка, ее часто также «обвиняют» в этих проблемах. Редко бывает, когда инженер-испытатель хотя бы рассмотрит возможность того, что арматура вызывает данные проблемы. Тем не менее следует помнить, если арматура имеет резонансы, на них могут влиять изделия, установленные на монтажной поверхности арматуры.

Рис. 16. Влияние нежесткой арматуры на приспособление для крепежа образца
Простая иллюстрация проблемы взаимосвязи «арматура-приспособление» показана на рис. 16. Сравнительно жесткое, хорошо спроектированное приспособление смонтировано на нежесткой арматуре, которая имеет резонансы в интересующем частотном диапазоне. Хотя приспособление может практически не иметь резонансов (оно имеет резонансные частоты, значительно превышающие интересующий частотный диапазон), система должна рассматриваться целиком. Когда жесткое приспособление установлено на нежесткой арматуре, оно получит деформации, возникающие как результат сборки этих элементов в единую конструкцию. Таким образом, мы видим, что на приспособление влияет арматура. Вместе они образуют систему, которая должна рассматриваться как единое целое. Трудно (если не невозможно) правильно спроектировать приспособление без учета динамики арматуры, на которой оно устанавливается.
Как обсуждалось ранее, местоположение акселерометра (формирует сигнал обратной связи для управления колебаниями) становится проблемой для случая, показанного на рис. 16. Место, где он закреплен на деформированной гибкой поверхности, будет оказывать существенное влияние на исполнение теста (рис.16 внизу справа).
Другая ошибка заключается в том, что многие считают, что установка нескольких акселерометров устранят подобную проблему. Это не так. Применение нескольких акселерометров для управления только означает, что для обратной связи с системой управления используется некоторое «усредненное» значение ускорения.
Решение проблемы очевидно связано с реконструкцией арматуры, чтобы устранить ее резонансы, но никто не хочет это делать из-за больших затрат, связанных с проектированием арматуры большого диаметра, свободной от резонансов в частотном диапазоне испытаний. А ведь только это дает истинное решение. Кроме того, никто не хочет выставлять себя в испытательной лаборатории или на заводе по производству шейкеров разоблачителем, объявив, что резонансы арматуры, во-первых, существуют и, во-вторых, существенно влияют на проведение испытаний. Но это на самом деле так.
Что же делать?
Для начала можно констатировать, что полное решение проблемы заключается в создании свободных от резонансов крепежных конструкций для любых испытаний на вибрацию. Помните, что крепежная конструкция — это система из арматуры, расширительной головки (или плиты стола скольжения), промежуточных приспособлений и т. п.
Но нельзя не признать, что изготовить идеально жесткую, легкую, свободную от резонансов крепежную конструкцию невозможно. Поэтому, как инженеры, мы должны, если это возможно (а иногда и невозможно), разработать эффективные практические решения. По крайней мере нужно найти обходное решение, а также тщательно и полно документировать ситуацию.
Арматура (а также и расширительная головка) обычно имеют только один или два резонанса, которые являются неприятными. Их необходимо идентифицировать так, чтобы можно было разработать обходной вариант. Можно использовать модели конечных элементов на ранней стадии проектирования крепежной конструкции, чтобы дать представление о ее слабых участках. Для уже существующих конструкций результаты экспериментального модального анализа зачастую идентифицируют резонансную частоту и форму колебаний, связанные со сборкой крепежной конструкции. Анимация формы колебаний часто наглядно идентифицирует критические части конструкции. Это помогает в коррекции частотных проблем, которые могут иметь место.
Суть перечисленных действий — четко определить проблему, чтобы инженерные проработки могли быть использованы для ее решения или определения альтернативных обходных путей. Конечно, прежде всего, мы всегда должны стремиться к созданию крепежных конструкций, свободных от резонансов, а не применять компромиссные меры по борьбе с ними.
Выводы
Крепежные конструкции (арматуры, головки расширителя, плиты столов скольжения, приспособления для фиксации образцов) являются важной частью системы вибрационных испытаний. Необходимо учитывать все эти элементы. Все они должны быть свободными от резонанса в интересующем диапазоне частот. Когда в конструкции существуют резонансы, их проявления не могут быть устранены с помощью одного или нескольких акселерометров обратной связи. Резонансы должны быть полностью задокументированы и идентифицированы для всей конструкции. Тогда можно получить инженерную оценку ситуации и применить эффективное решение, чтобы провести испытания наилучшим образом.
Резонансы оказывают огромное влияние на проводимые вибрационные испытания и не исчезают только потому, что никто не нашел времени, чтобы исследовать их. Их не устранить с помощью системы управления.
- Avitabile P. Why you can’t ignore those vibration fixture resonances // S V, Sound and Vibration. № 33 (3).
 12 июля, 2022
12 июля, 2022 13 июня, 2024
13 июня, 2024